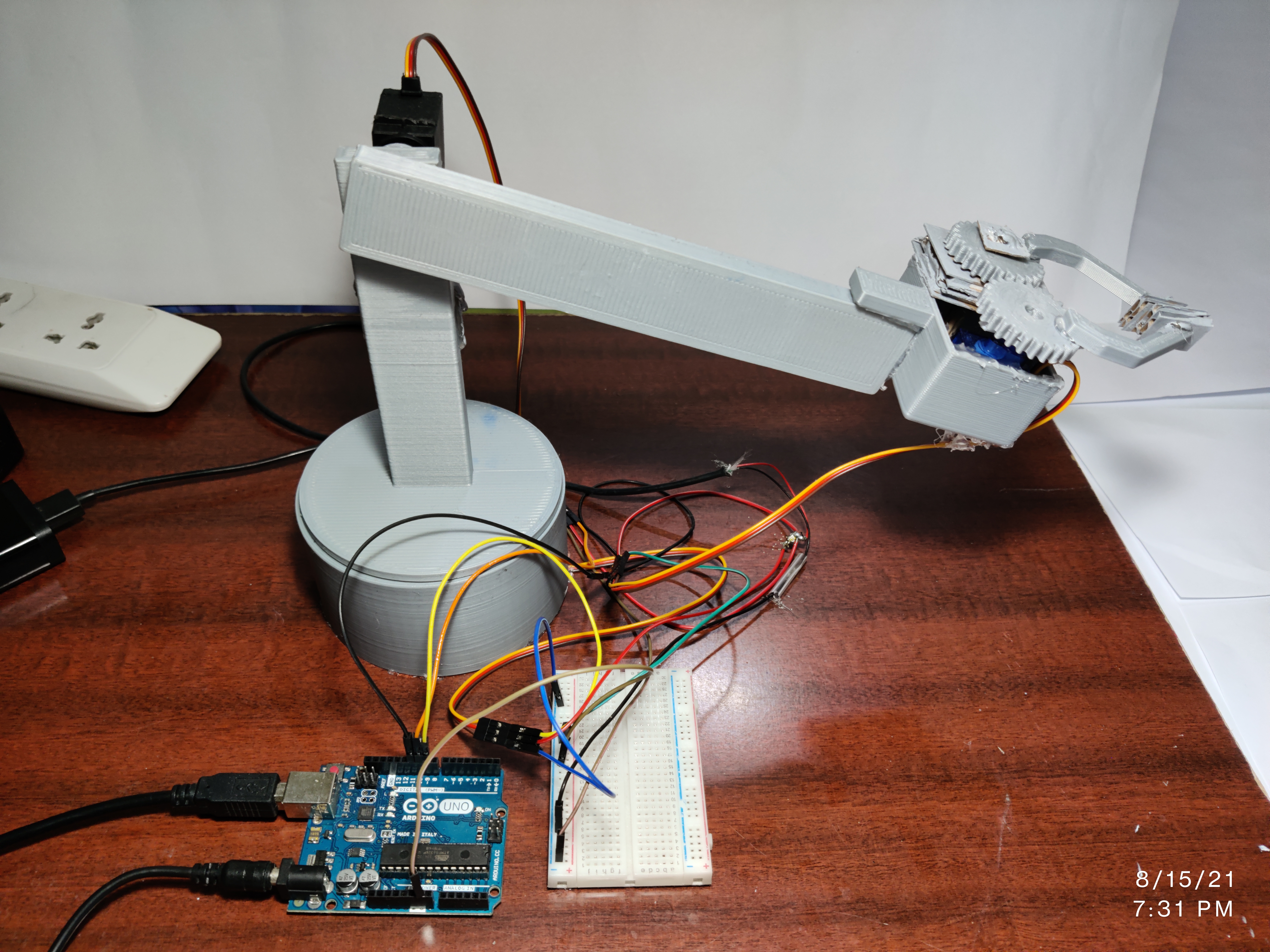
In this project, we designed and constructed a robotic gripper with three degrees of freedom, controlled using hand gestures. This robotic gripper finds many applications in industrial and automation processes. The robot takes input through visual feed and processes it using Computer Vision. This processed data is sent to an Arduino Uno microcontroller via serial communication, which in turn controls the servo motors. The entire assembly was modelled, and 3D printed.
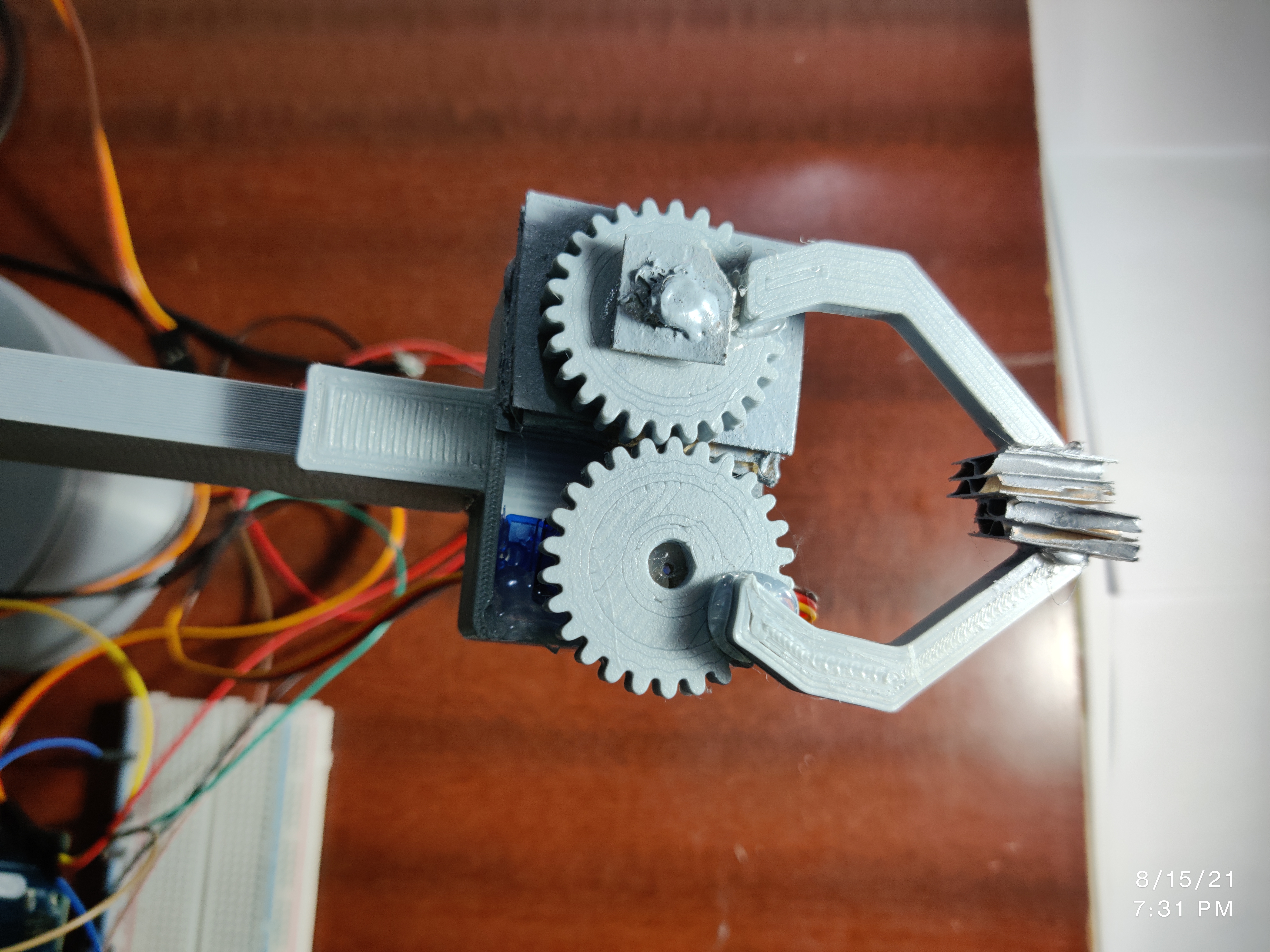
A sophisticated gear mechanism was used to control the claws of the gripper.
There is always a scope for improvement of this project. The following are a few
improvements that can further increase the capabilities of this robot:
1. Including a feedback loop using sensors or cameras near the gripper to increase efficiency.
2. Using object detection to make the robot completely autonomous.
Those who are interested can have a look at the complete documentation of the project here.
1. Including a feedback loop using sensors or cameras near the gripper to increase efficiency.
2. Using object detection to make the robot completely autonomous.
Those who are interested can have a look at the complete documentation of the project here.

