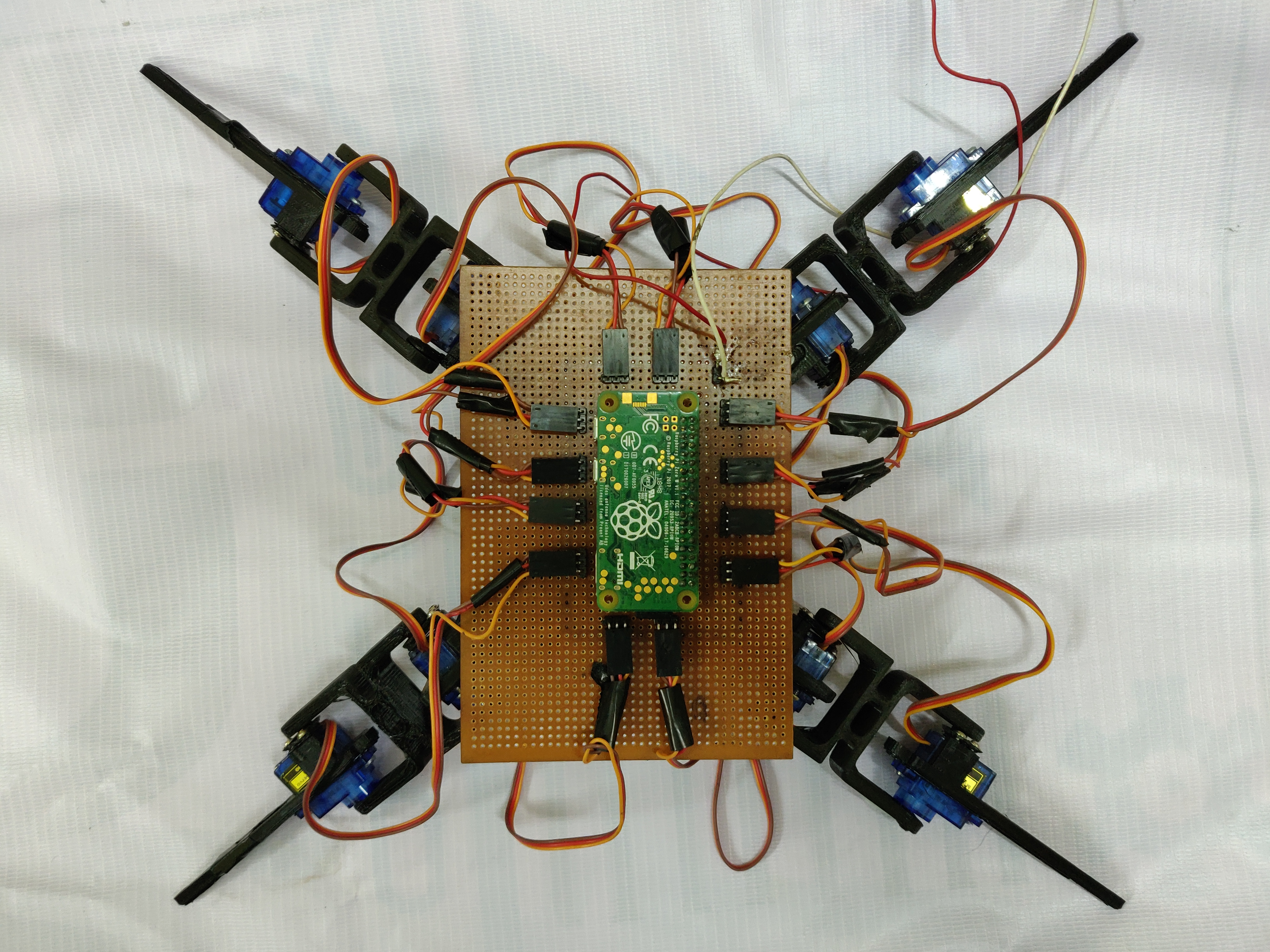
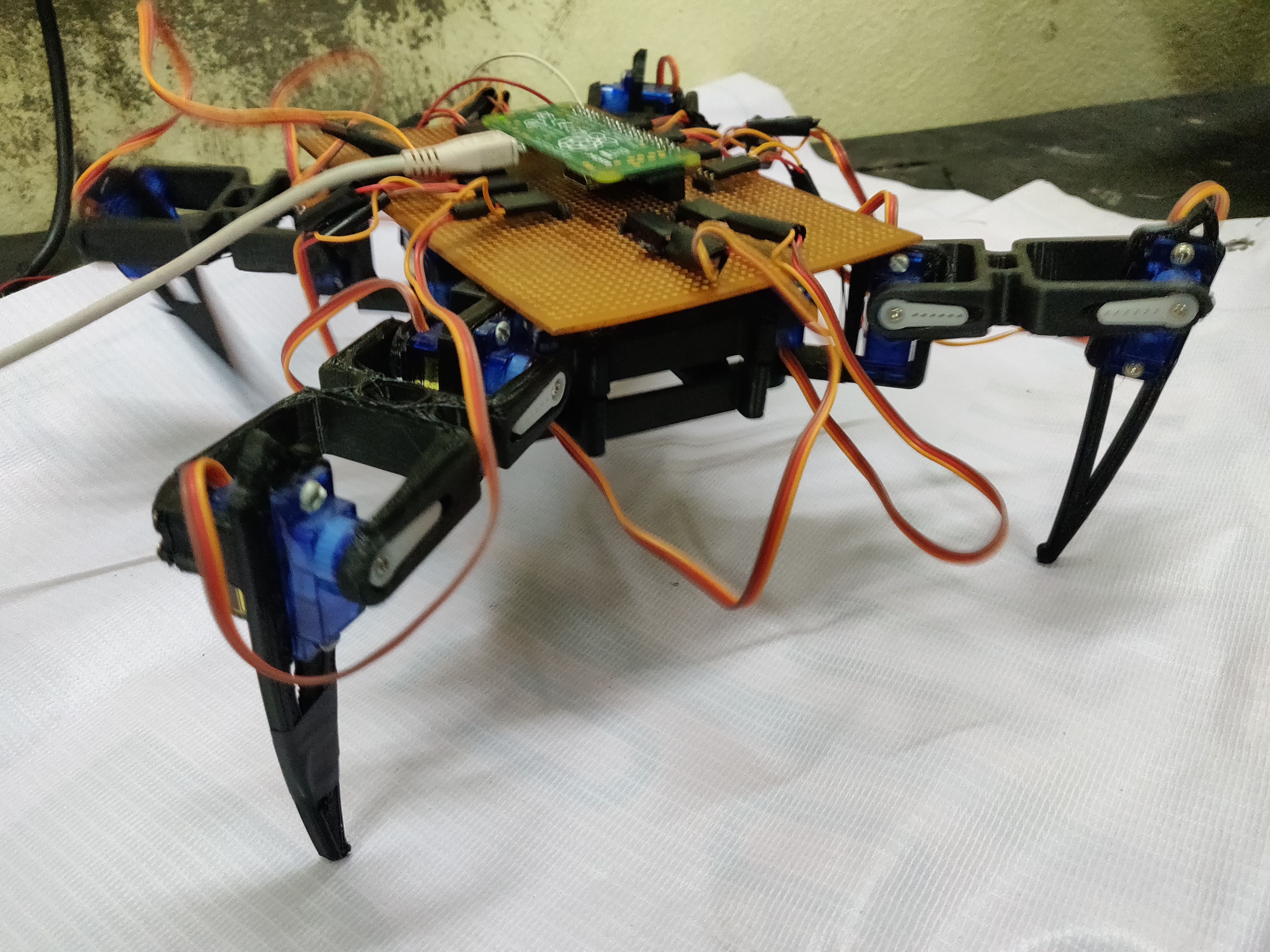
A quadruped bot or spider bot is a movable robot that mimics animal walking. The bot made by Makerspace lab has four legs each with two degrees of freedom. Two servos were used to control the hip joint and knee joint. A Raspberry Pi Pico microcontroller has been used to control the servos.
A quadruped has a huge advantage over wheeled locomotion. It can adapt to rough and uneven surfaces. It can easily navigate over rough terrain, unreachable to humans.
The entire chassis has been 3D printed. We programmed the microcontroller through an attached laptop via serial communication. Programmed sequences were created for the bot to get-up, move forward and backward, turn left and right. This was achieved after rigorous experimentation of various configurations of the servos.