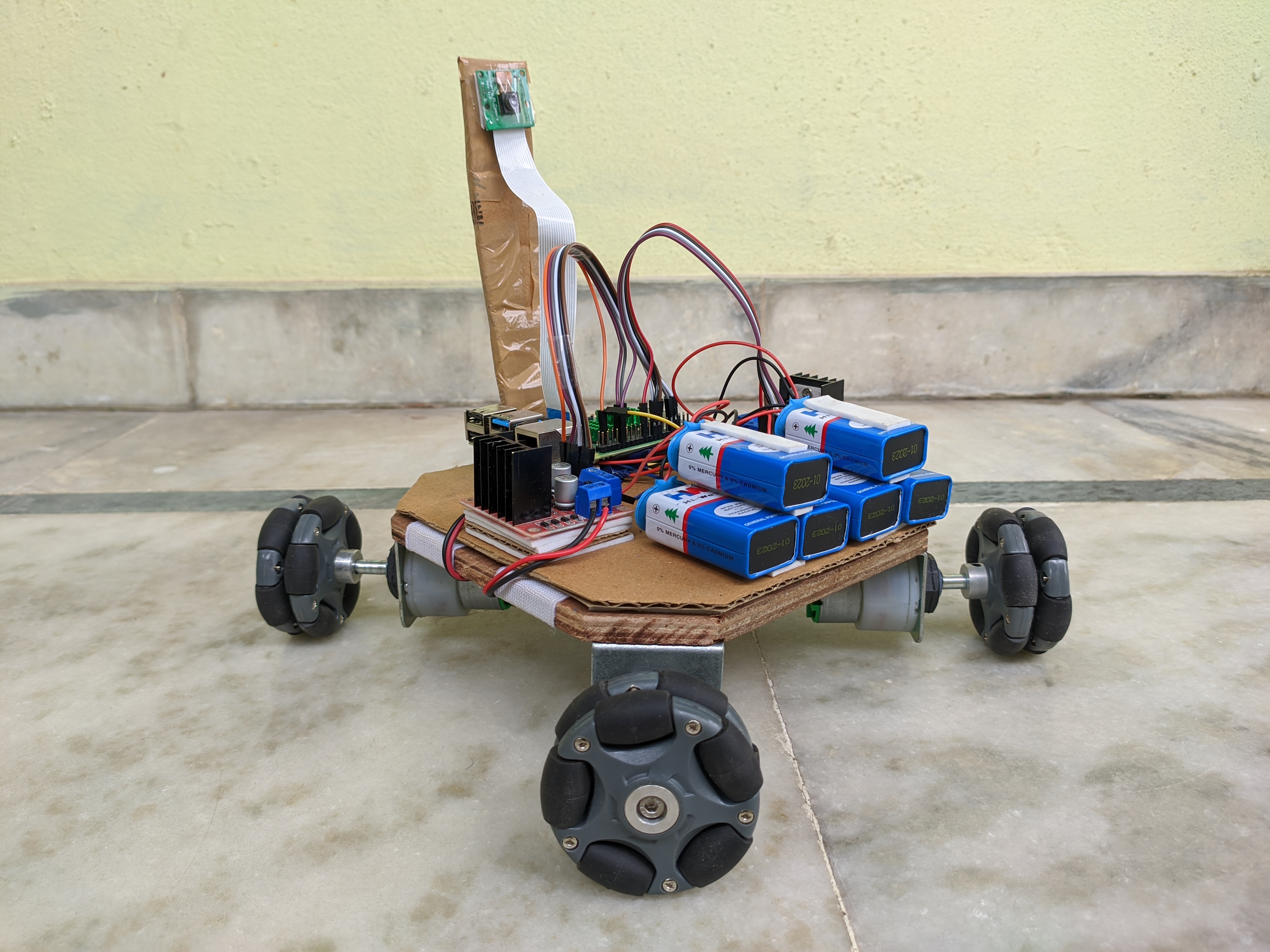
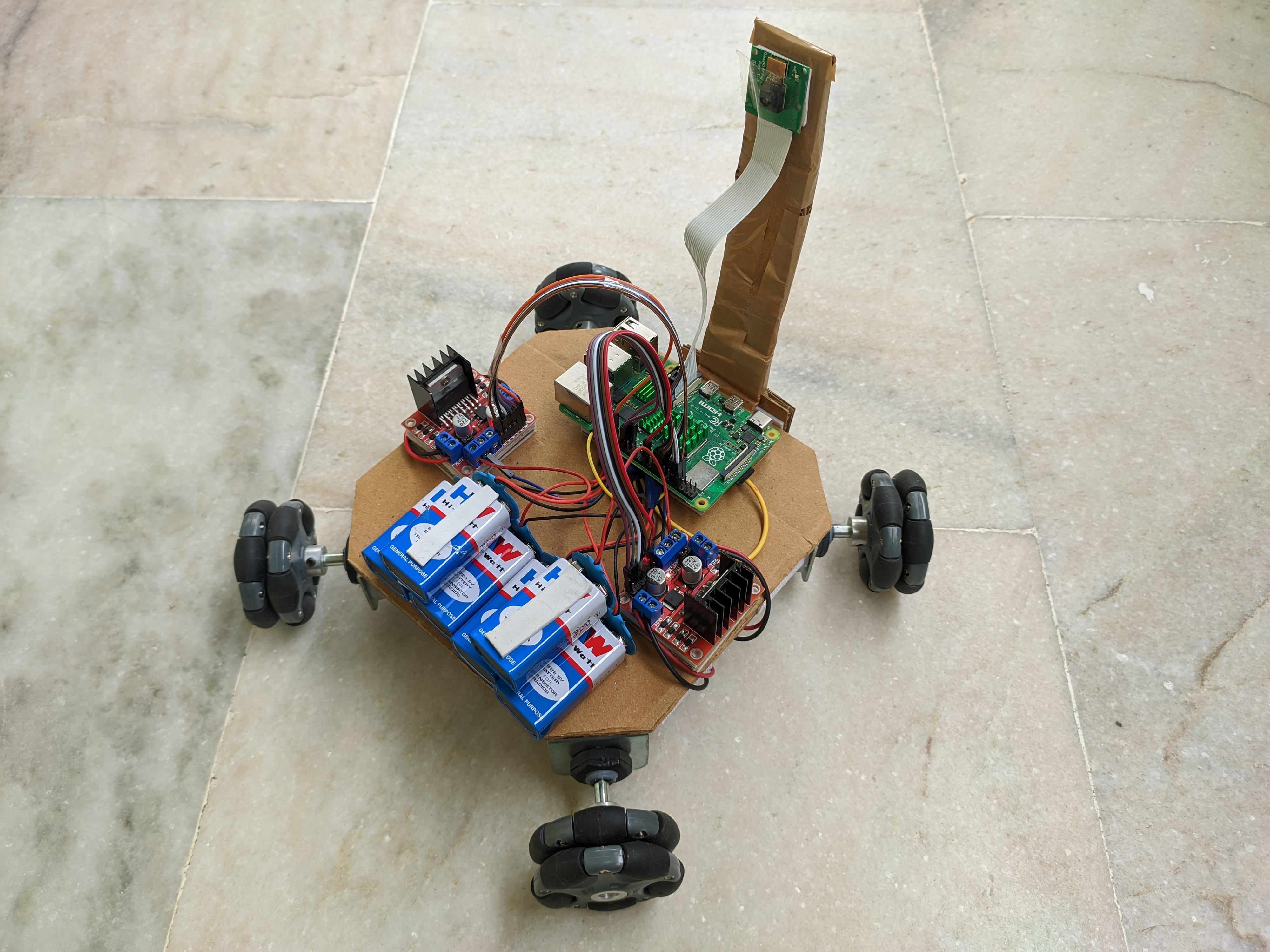
The aim of this project is to assemble and program a motion controlled omni-directional bot. Omni-directional robots are capable of driving in any direction in a 2D plane without the need for a steering mechanism. It’s application lies in tight workspaces like factories and hospitals. Our model is a made using omni-wheels capable of moving in eight directions, rotation about its axis and following a target using Computer Vision while maintaining camera orientation at all times. The omni-wheels are controlled by the motors drivers connected to the WiFi module, Raspberry Pi, which is capable of independently processing all the input data independently.
Scope of improvement in our project occurs in the following sections:
1. Implementation of closed loop PID control to increase accuracy of bot movement
2. Improving upon movement detection techniques with higher FPS.
Learn more about the project here.
1. Implementation of closed loop PID control to increase accuracy of bot movement
2. Improving upon movement detection techniques with higher FPS.
Learn more about the project here.

